Automated Raspberry Picking End-Effector
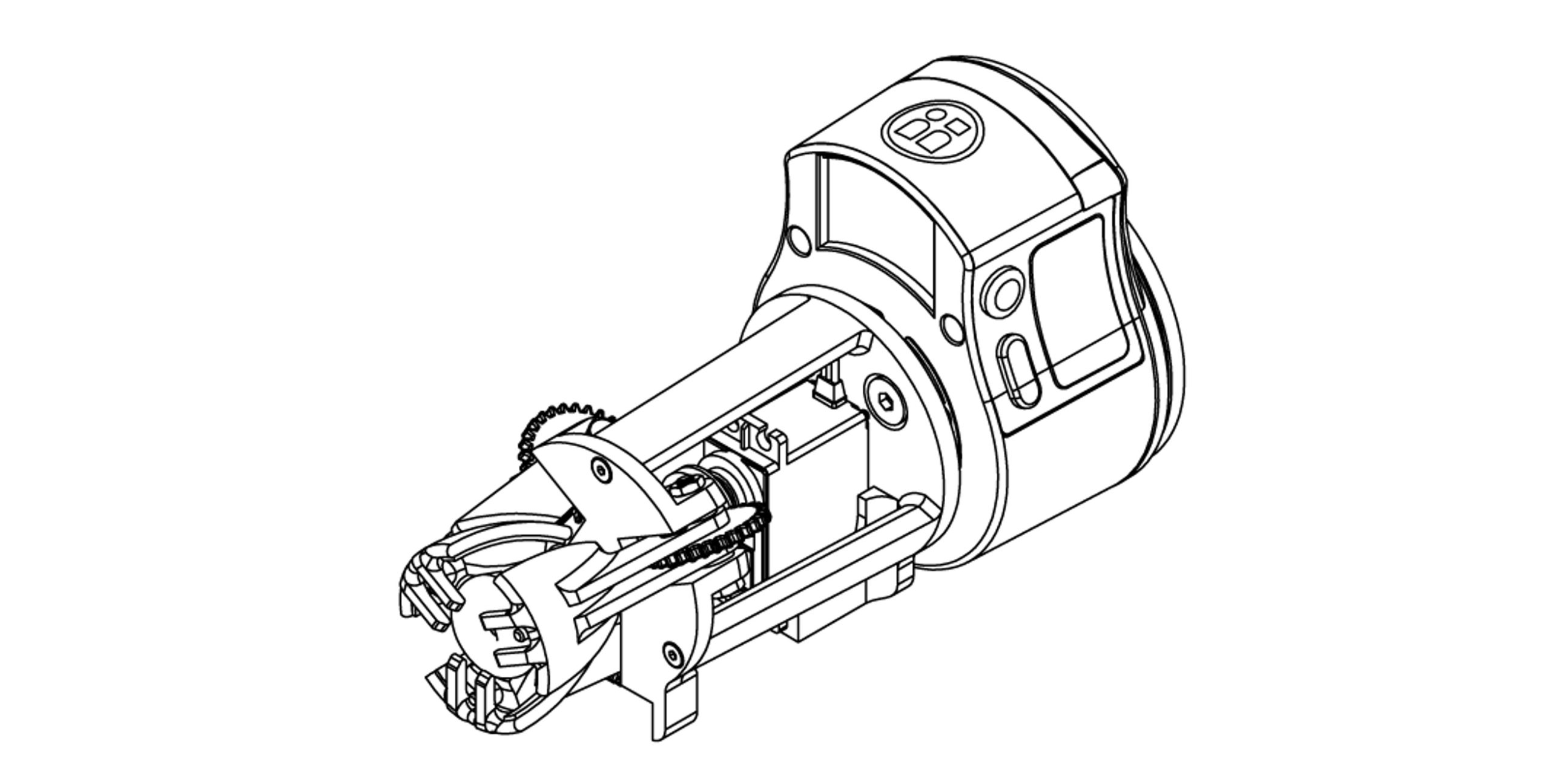
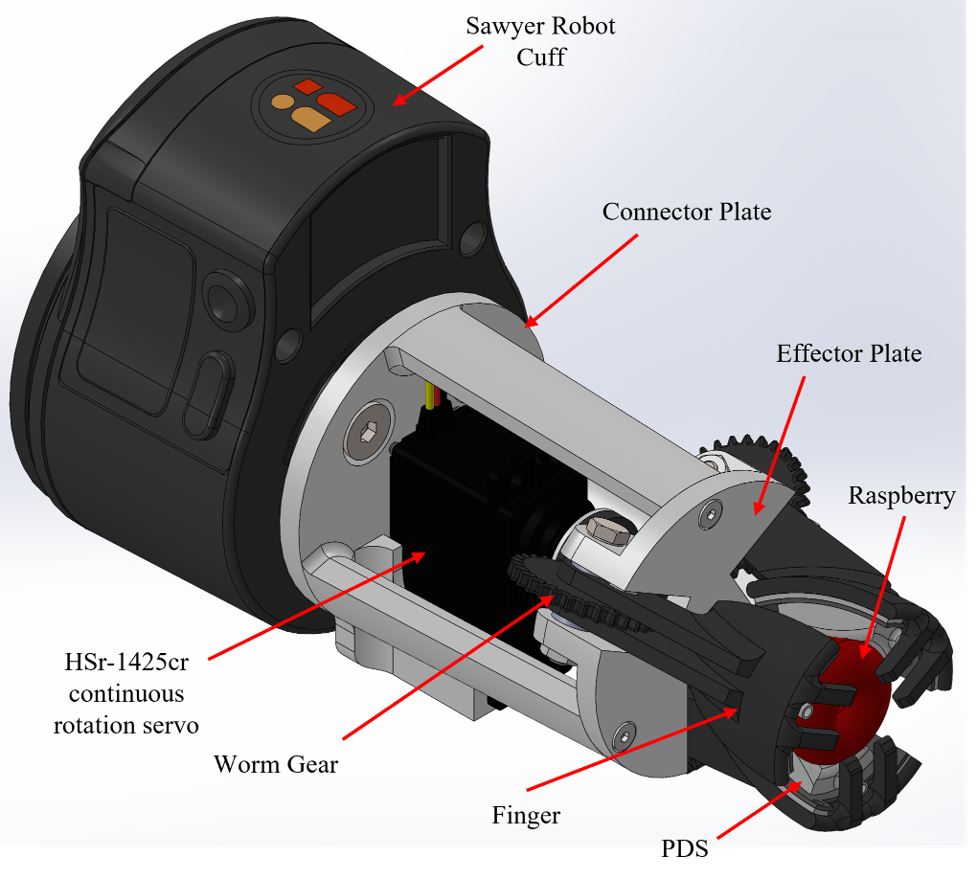
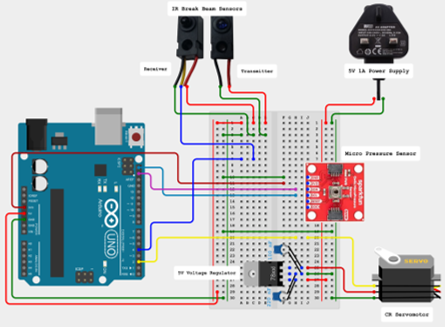
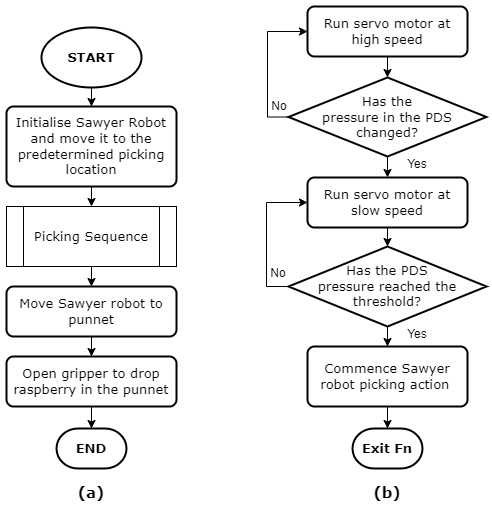
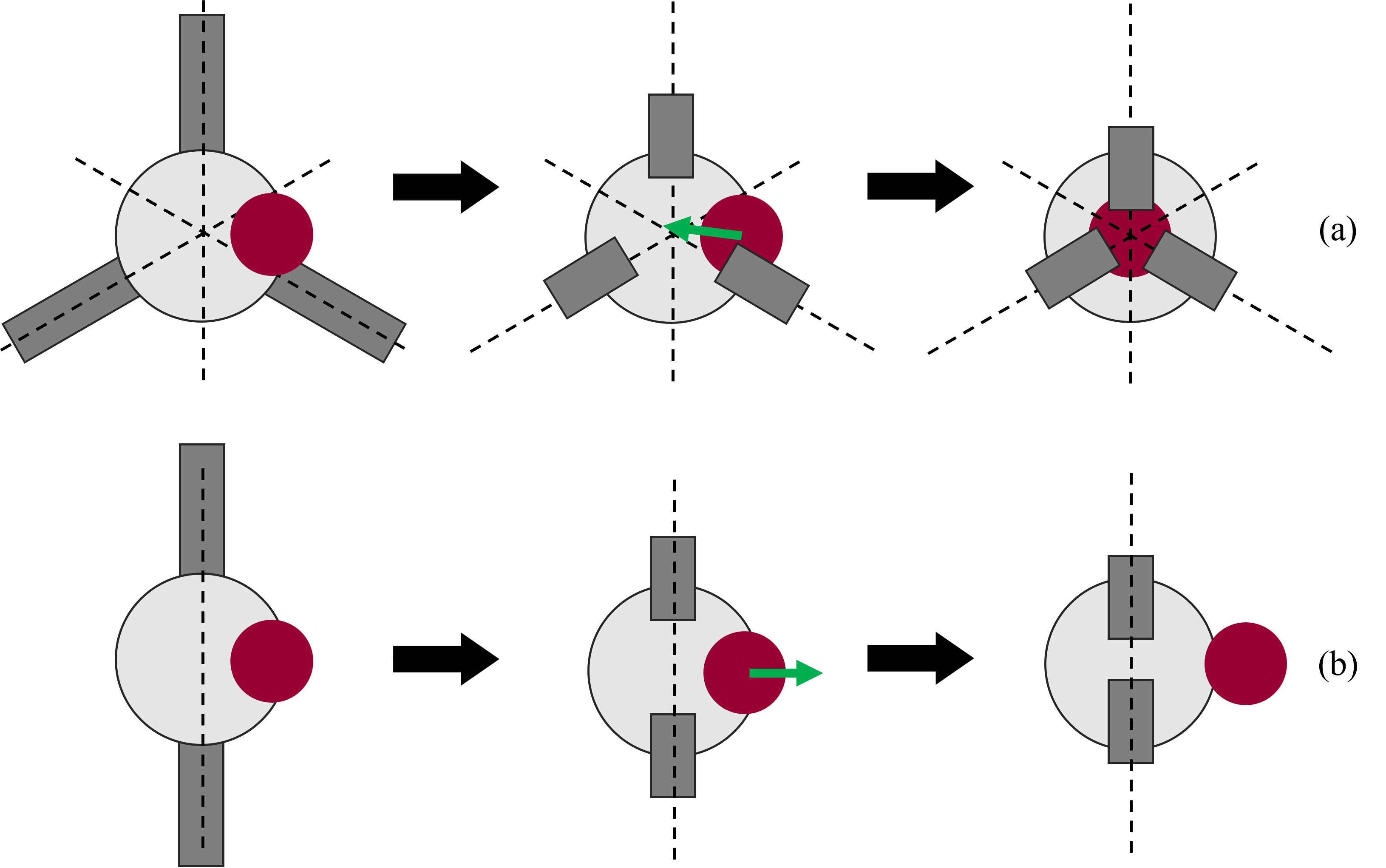
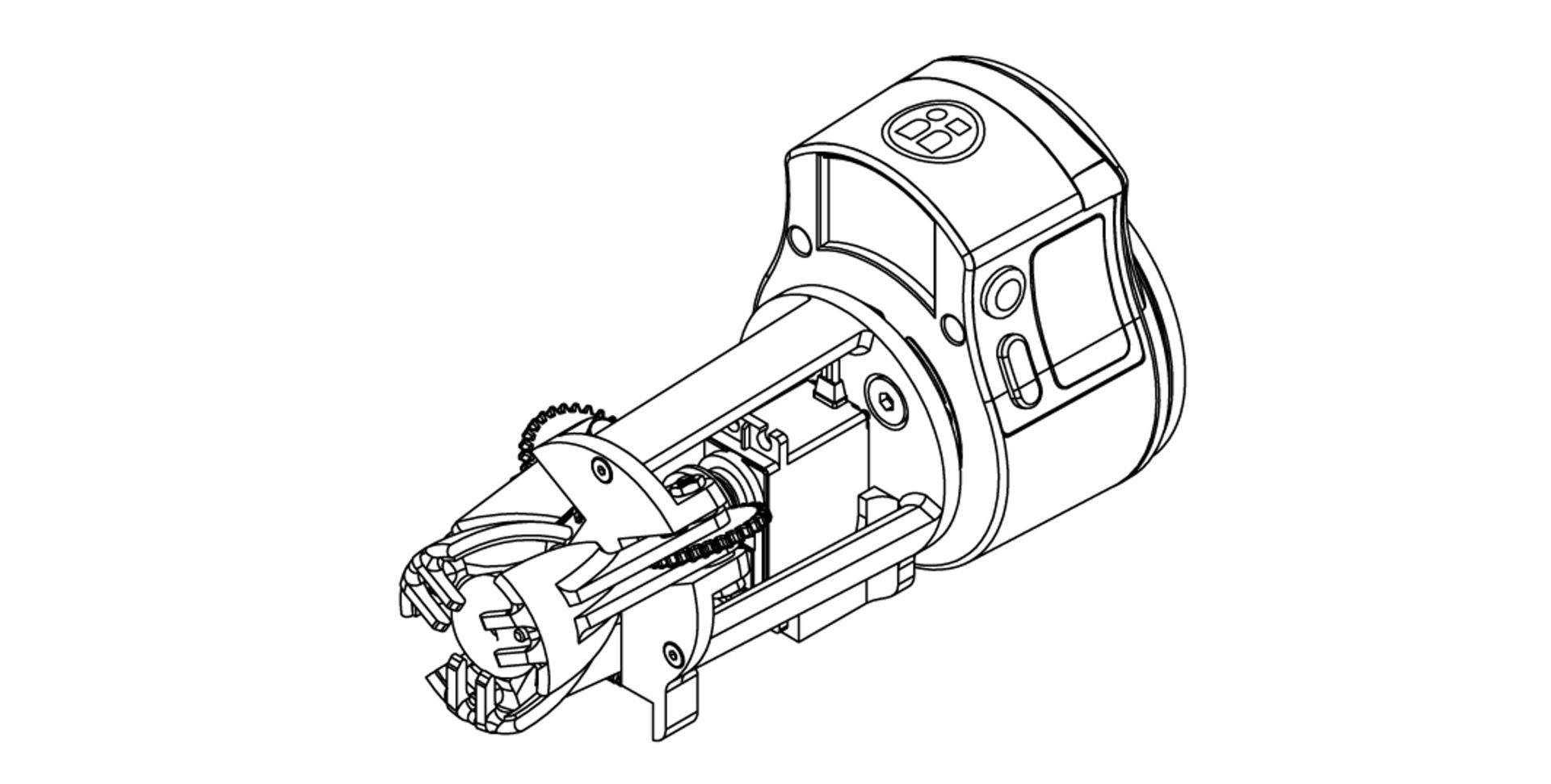
A final year solo mechatronics R&D project, I conceptualised and created an automated robotic gripper tailored for the delicate task of picking raspberries.
See some of the images, tools, tech and project outcomes below.

Tools & Tech
- SolidWorks
- Cura
- Preform
- Arduino IDE
- VS Code
- Microsoft Project
- MATLAB
- LaTeX Overleaf
- SLA, SLS & FDM printing
Outcome & Impact
The time-to-pick was 50% quicker than the current state of the art system at the time of testing. Valuable experience running a project from conception through to prototype testing and validation was gained. Liaising with technicians, suppliers and academics provided experience in integrating knowledge for the benefit of the project.